UC3M develops soft joints for robots
11/10/22
The Universidad Carlos III de Madrid (UC3M) has developed intelligent soft joints for robots to make them more versatile, deformable and stable. The aim of this project, called SOFÍA, is to make robots more robust and improve the interaction between the machine and people.
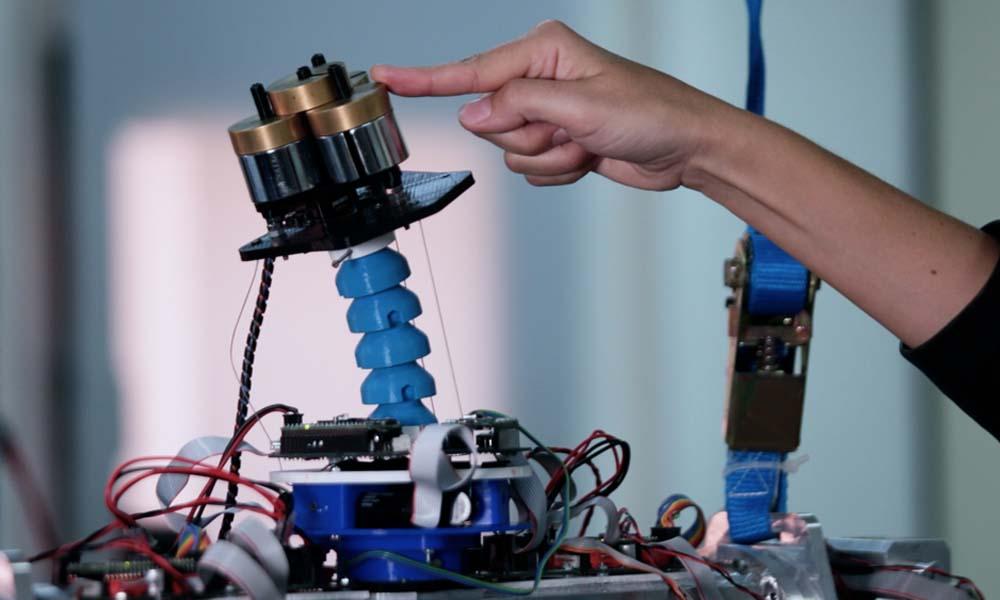
This invention by the UC3M RoboticsLab research group is characterised by the fact that it is made with a soft, highly deformable material which can be articulated by means of a thread that acts like tendons. These joints are more mobile and versatile than the rigid joints that are currently in use. “For example, accessing the inside of a pipe with a rigid robot is very difficult because it would get stuck. If we have a kind of “elastic worm”, we could approach that inspection in a much safer, more flexible and more versatile way”, says Concha Monje, lecturer in UC3M’s Systems Engineering and Automation Department and lead researcher of the SOFÍA project.
In addition, the research team has developed intelligent controllers based on artificial intelligence techniques, which allow these joints to be able to support different loads at their end while carrying out their tasks. These controllers estimate the load that the robot has picked up and ensure precise positioning so that the joint maintains its integrity. “We are able to estimate the deformation they are undergoing by measuring the material itself. This measurement of the deformation is necessary to know what position the joint is in, what stresses it is undergoing and to be able to act and control it”, says the researcher.
One of this project’s contributions is at the healthcare level. For example, people who need robotic assistance to carry out certain tasks will be able to have robots which are safer and more versatile in their movement.
As part of this research, ‘origami’-style joints based on paper folding have also been developed. Acetate and carbon nanofibre sensors were used for this. “There is an innovative line that deals with origami, which are deformable volumes that allow mobility of the joint itself”, says Concha Monje.
All of these developments are being implemented in the TEO humanoid robot, belonging to the UC3M Roboticslab, which already has a soft neck-like joint. “Soft robotics is expected to have a direct impact on the development of robots. It is already a reality that small and medium-sized international companies are investing in the commercialisation and development of this type of robotics, and the figures are expected to rise”, the researcher concludes.