La UC3M desarrolla articulaciones blandas para robots
10/11/22
La Universidad Carlos III de Madrid (UC3M) ha desarrollado articulaciones blandas inteligentes para robots para hacerlos más versátiles, deformables y estables. El objetivo de este proyecto, denominado SOFÍA, es dotar de mayor robustez a los robots y mejorar la interacción entre la máquina y las personas.
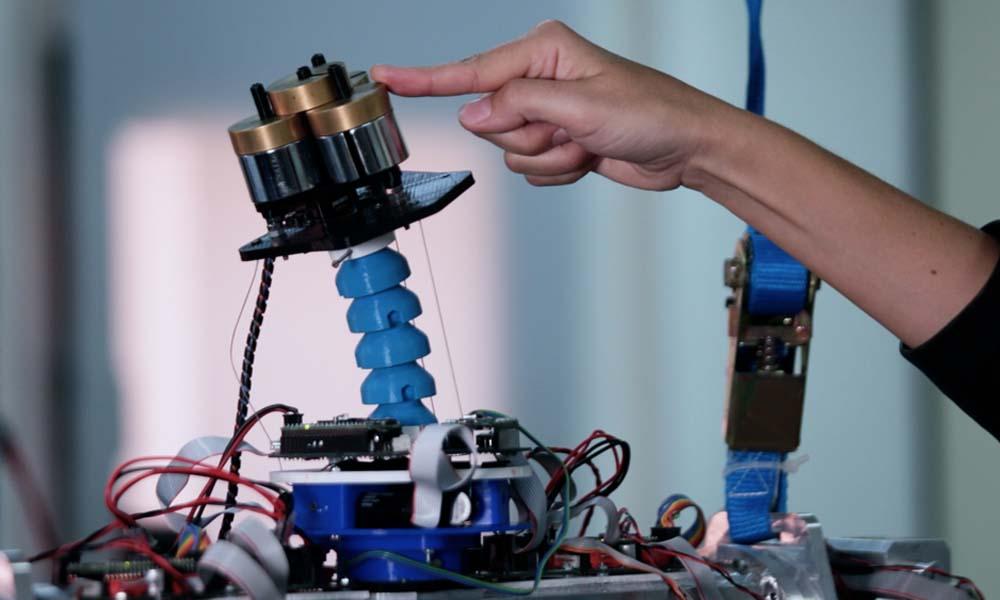
Esta invención del grupo de investigación RoboticsLab UC3M se caracteriza por estar fabricada con un material blando, altamente deformable y que puede articularse mediante hilo sedal que actúa como tendones. Estas articulaciones son más móviles y versátiles que las rígidas que se utilizan actualmente. “Por ejemplo, para acceder al interior de una tubería, hacerlo con un robot rígido es muy difícil porque se quedaría atascado. Si lo que tenemos es una especie de “gusano elástico”, podríamos abordar esa inspección de una forma mucho más segura, flexible y versátil”, apunta Concha Monje, profesora del Departamento de Ingeniería de Sistemas y Automática de la UC3M e investigadora principal del proyecto SOFÍA.
Además, el equipo investigador ha desarrollado controladores inteligentes basados en técnicas de inteligencia artificial, que permiten a estas articulaciones ser capaces de soportar diferentes cargas en su extremo durante la realización de sus tareas. Estos controladores estiman la carga que el robot ha cogido y garantizan un posicionamiento preciso para que la articulación mantenga su integridad. “Somos capaces de estimar la deformación que están sufriendo midiendo sobre el propio material. Esta medida de la deformación es necesaria para saber en qué posición se encuentra dicha articulación, qué tensiones está sufriendo y poder actuar y controlarla”, apunta la investigadora.
Una de las aportaciones de este proyecto es a nivel asistencial. Por ejemplo, las personas que precisen de asistencia robótica para la realización de determinadas tareas podrán disponer de robots más seguros y versátiles en sus movimientos.
En el marco de esta investigación, también se han elaborado articulaciones de tipo ‘origami’, basadas en el plegado del papel. Para ello, se ha utilizado acetato y sensores de nanofibra de carbono. “Hay una línea innovadora que versa sobre origamis, que son volúmenes deformables que permiten una movilidad de la propia articulación”, refiere Concha Monje.
Todos estos desarrollos se están implementado en el robot humanoide TEO, perteneciente al Roboticslab UC3M, que ya dispone de una articulación blanda a modo de cuello. “Se estima que la robótica blanda impacte de lleno en el desarrollo de los robots. Es ya una realidad que pequeñas y medianas empresas a nivel internacional están apostando por la comercialización y desarrollo de este tipo de robótica, y se espera que las cifras vayan en aumento”, concluye la investigadora.